跳至内容
蓝知博库
联系方式
蓝知博库
Main Menu
专题列表
个人中心
找回密码
标签云
模块化布局页面
示例页面
空白页面
网址导航
联系方式
激光雷达
上位机
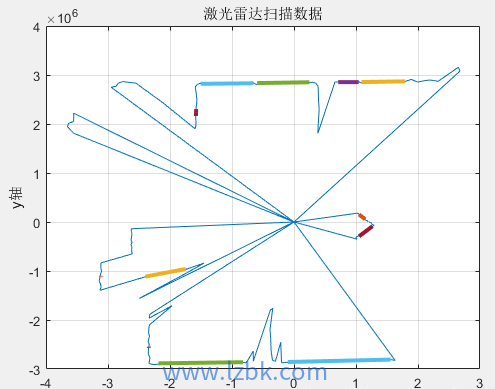
ROS中激光雷达数据处理之特征提取 C++源码
/
ROS中激光雷达的数据就是一串距离值,每隔1度一个距离值(具体情况得看激光雷达的参数),通过实测激光雷达的数据 […]
滚动至顶部